MASZYNY ELEKTRYCZNE
Projekt i wykonanie bezzałogowego systemu latającego
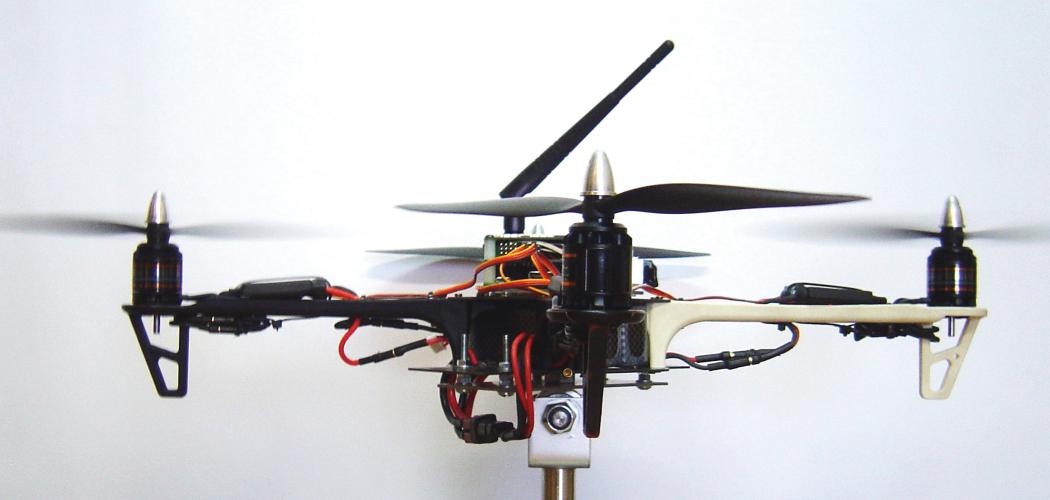
Streszczenie: W ramach pracy wykonano bezzałogowy system latający w konfiguracji z czterema silnikami zwany quadrocopterem. Głównym sterownikiem jest Raspberry Pi2 wraz z trzema dołączonymi modułami odpowiedzialnymi za sterowanie prędkością obrotową silników, wykonywanie pomiarów prędkości kątowej i przyspieszenia oraz zapewnienie łączności zgodnie ze standardem Wi-Fi.
